
Research interests:
- Networked Multi-Robot Systems
- Intelligent Teleoperation
- Robot Communications
- Robotics in Nuclear Applications
- Search and Rescue Robotics
- Human-Robot interfaces
- Machine Learning
Google Scholar profile
Research Gate profile
 orcid.org/0000-0001-5451-8209
orcid.org/0000-0001-5451-8209Welcome to my homepage!
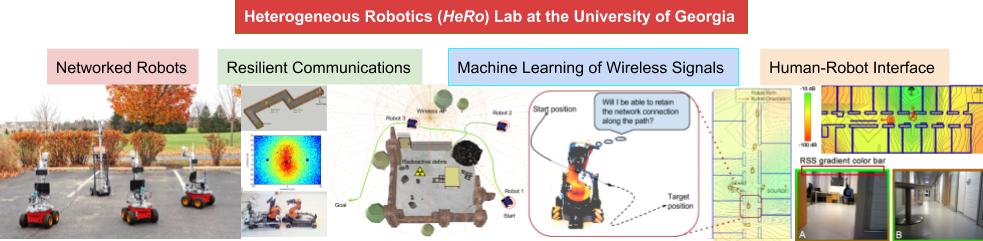
I'm an Assistant Professor at University of Georgia (UGA) Department of Computer Science, with a focus on Robotics. I direct the Heterogeneous Robotics (HeRo) reserach lab. I'm a faculty fellow in the Faculty of Robotics and the Institute for Artificial Intelligence at UGA.
Previously, I was a Postdoctoral Associate at Purdue University, working with Prof. Byung-Cheol Min of SMART Lab on projects relevant to Networked Robotics and Assistive Technologies.
Before that, I was working as a Postdoctoral Researcher in the Robotics Perception and Learning (RPL) lab (previously Computer Vision and Active Perception lab) at KTH Royal Institute of Technology, Sweden with Prof. Petter Ogren. At KTH, I was involved in two European projects under EU-FP7 grants, TRADR and RECONFIG.
For my doctoral research, I worked at CERN (European Organization for Nuclear Research), Switzerland, conducting research in mobile robotics and received my Ph.D. (Robotics and Automation) from Universidad Politecnica de Madrid (UPM), Spain in Oct 2014. My Ph.D. thesis titled "Wireless communication enhancement methods for mobile robots in radiation environments" was on teleoperated mobile robots for radiation survey applications at CERN. I was part of the EU-ITN project PURESAFE as a Marie-Curie Early State Researcher. I had developed tools for optimizing and predicting wireless communication in mobile robots applied in hostile environmental conditions. While at CERN, I also led a part of the Robotic Train project (TIM - Train Inspection Monorail) for conducting radiation inspections at the Large Hadron Collider (LHC).
For full list of publication click hereResearch
My research interests are the following:
- Control and Communication of Heterogeneous Mobile Robots and Networked Multi-Robot Systems;
- Machine Learning based Applications in Robotics and Wireless Communications (for perception, classification, and activity recognition).
Robot Control and Communication
Multi-point Rendezvous and Multi-Robot Herding: In this work, we introduce a coordinate-free multi-point rendezvous control strategy to enable multiple robots to gather at different locations by tracking their hierarchy in a connected interaction graph. A key novelty in this strategy is the gathering of robots in different groups rather than at a single consensus point, motivated by autonomous multi-point recharging and flocking control problems.
Multi-Robot Hierarchical Rendezvous Control: Using a hierarchical network topology tree, we devised a rendezvous control algorithm that can work on distributed fashion using the local sensing information at the robots, to collect all the robots rendezvous at a desired location in a hierarchical movement aided by the bearing-based source tracking of radio signals.

Resilient Communication-Aware Motion Planner (RCAMP) (with Sergio Caccamo): We developed a resilient motion planner for mobile robots to find an optimal path that guarantees traversability and wireless connectivity. The RCAMP can also be used to re-establish the wireless connection in case of a communication loss with a mobile robot.
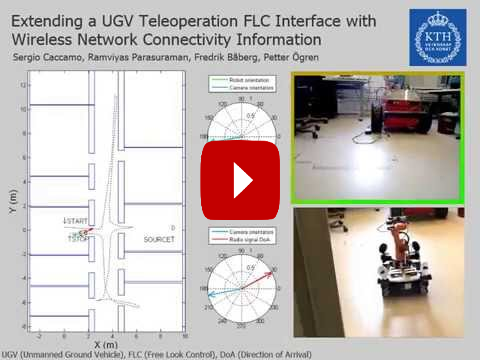
Human-Robot Interface (HRI) for Wireless Network Connectivity Situation Awareness in UGV Teleoperation (with Sergio Caccamo): We extended a UGV Teleoperation Interface called Free Look Control (FLC) with the Wireless Network Connectivity Information. We used directional antennas to obtain the Direction of Arrival (DOA) (or gradients) of the Wi-Fi Received Signal Strength. Using this DoA we devised a Human-Robot Interface (HRI) that can support a teleoperator with Situation Awareness (SA) on wireless connectivity.
Machine Learning
Wisture - A Solution for Gesture detection in smartphones using WiFi signals (with Mohamed Haseeb): Wisture is a new online machine learning solution for recognizing touch-less dynamic hand gestures on a smartphone. Wisture relies on the standard Wi-Fi Received Signal Strength (RSS) using a Long Short-Term Memory (LSTM) Recurrent Neural Network (RNN), thresholding filters and an artificial traffic induction approach. Look at the Codes and Datasets page for more information on the Wisture.
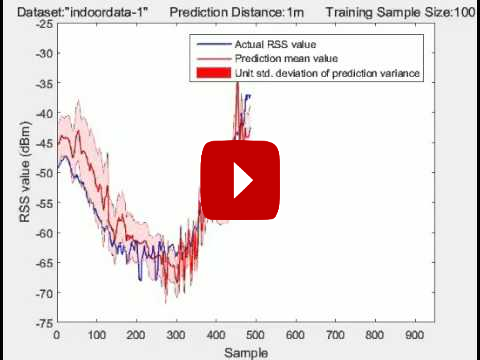
Gaussian Processes based Radio Signal Strength Prediction on Mobile Robots: We used Gaussian Process Regression to predict spatial changes in the RSS on the path of a mobile robot. The solution is composed of two stages. First, the location of radio signal source is predicted using a grid-based RSS gradient estimation method. Second, an online iterative Gaussian Process Regression (GPR) solution is used to predict the RSS in the future robot positions with reference to the current position of the robot.
Reinforcement Learning of Behavior Trees using Genetic Programming (with Michele Collendanchise): Taking advantage of modularity and reactiveness of Behavior Trees, we propose a model-free Automated Planned framework using Genetic Programming to derive an action plan for an autonomous agent to achieve a given goal in unknown environments. The advantages of the proposed approach are based on the advantages of BT over Finite State Machines. In particular, our approach avoids the problem of logic violation during the learning process.

Heterogeneous Robotics (HeRo) Research Lab
I'm currently establishing a new Heterogeneous Robotics (HeRo) Research Lab at UGA. Website of the lab: hero.uga.edu
Recruiting Students:
I am looking for highly motivated undergraduate and graduate students with research interests in Heterogeneous Multi-Robot Systems. Please send me an email with a breif statement of interest and your CV, if you are interested in working with me!
Contact
ramviyas at uga dot edu
Phone: (706) 542 2911
Office: 803 Boyd Graduate Studies Research Center, Department of Computer Science, University of Georgia,Athens, GA 30602, USA
Director, HeRoLab - Heterogeneous Robotics Laboratory , Lab: 427-437 Stageman Coliseum Basketball Stadium. University of Georgia,Athens, GA 30602, USA